-
All products
- Category
- SPORTS SALES
- MARINE SALES
-
PaineSport
PaineSport
- GPS Smartwatch
-
Depth Sounders and Combined Eco / GPS
Depth Sounders and Combined Eco / GPS
- GPS and Cartography
- GPS - Multifunction and Radar
- Instruments and Autopilots
-
Communication - VHF, AIS, Epirb, Satphone
Communication - VHF, AIS, Epirb, Satphone
-
HiFi entertainment and AM / FM antennas, TV and TVSAT
HiFi entertainment and AM / FM antennas, TV and TVSAT
- Tele / Thermal Camera Binoculars
- Electric engines
-
Accessories
Accessories
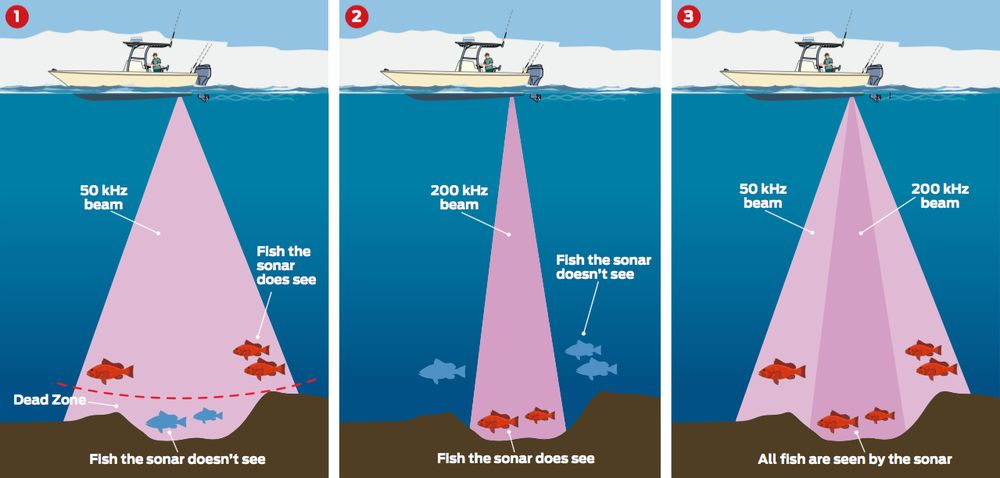
 Angles of the cone
Angles of the cone