-
Todos los productos
- Categorías:
- SALIDA
-
PaineSport
PaineSport
- Reloj inteligente con GPS
-
Sondas de pesca y sondas de pesca/GPS combinadas
Sondas de pesca y sondas de pesca/GPS combinadas
- GPS y cartografía
- GPS - Multifunción y Radar
-
Instrumentos y pilotos automáticos
Instrumentos y pilotos automáticos
-
Comunicación - VHF, AIS, EPIRB, teléfono satelital
Comunicación - VHF, AIS, EPIRB, teléfono satelital
-
Entretenimiento HiFi y Antenas AM/FM, TV y TVSAT
Entretenimiento HiFi y Antenas AM/FM, TV y TVSAT
- Telescopio/binoculares termográficos
- Motores eléctricos
- Accesorios
-
Electricidad marina
Electricidad marina
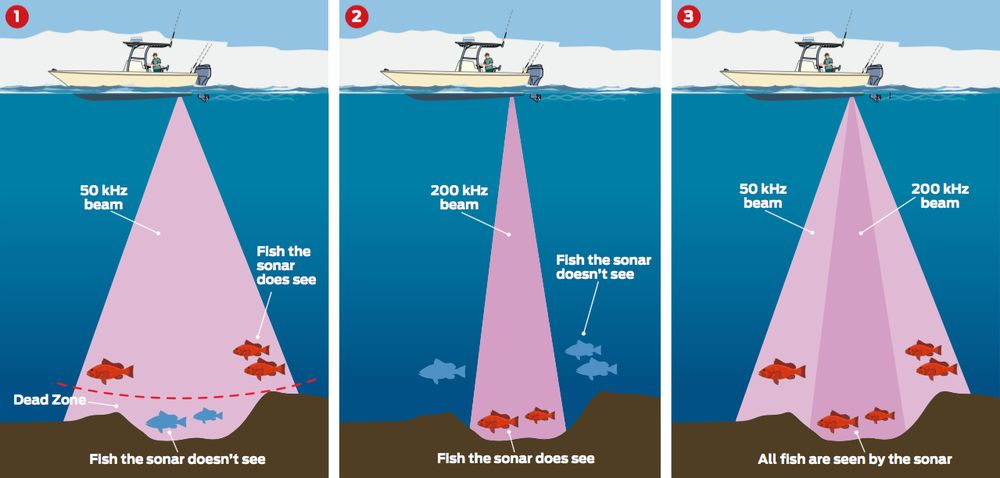
 Ángulos del cono
Ángulos del cono